
Industrial robot is a multi-joint manipulator or multi-degree-of-freedom machine device for the industrial field. It can automatically perform work and is a machine that realizes various functions by its own power and control capabilities. It can accept human command or run in accordance with pre-programmed procedures. Modern industrial robots can also act according to the principles and programs established by artificial intelligence technology.

Robots are becoming more and more intelligent, and they are playing an increasingly important role in manufacturing companies. Promote manufacturing innovation through advanced IT and automation technologies to achieve "intelligence", improve efficiency, and reduce costs
1. Development background of industrial robots
From 1920, the word "Robot" was coined by Czech playwrights. Now robots have been developed for nearly 100 years, from the original purely industrial robots used for handling to the second generation of industrial robots with visual sensors and information processing technology. , To the "intelligent robot" currently under study, the development and application of industrial robots are changing rapidly.
2. Application scenarios of industrial robots
In just over 50 years, robot technology has developed rapidly. Among the many manufacturing fields, the most widely used field of industrial robots is the automobile and auto parts manufacturing industry, and is constantly expanding into other fields, such as Mechanical processing industry, electrical and electronic industry, rubber and plastic industry, food industry, wood and furniture manufacturing and other fields.
In industrial production, industrial robots such as welding robots, grinding and polishing processing robots, welding robots, laser processing robots, spraying robots, handling robots, and vacuum robots have all been widely adopted.
1. Grinding and polishing robot
In just over 50 years, robot technology has developed rapidly. In many manufacturing fields, grinding and polishing robots are mainly used in aviation, nautical, and nuclear power blade grinding and polishing. Use flexible contact and visual positioning to reduce grinding and polishing defects.
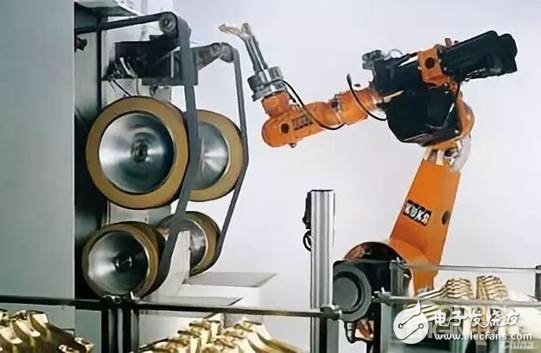
Compared with manual grinding and polishing, it has the characteristics of short processing time, high profile accuracy, small surface roughness and good processing consistency. Can adapt to large loads and harsh working environment. High precision is required.
2. Welding robot
Arc welding robots are mainly used in the welding production of various types of automotive parts. There are mainly two types of welding operations for melting electrodes and welding operations for non-melting electrodes.

In this field, the major international industrial robot manufacturers mainly provide unit products to complete equipment suppliers. Application characteristics: fast and smooth movement is required, and the positioning accuracy is high.
3. Laser processing robot
The laser processing robot applies robot technology to laser processing, and realizes a more flexible laser processing operation through a high-precision industrial robot.

Through the automatic detection of the processed workpiece, the model of the processed part is generated, and then the processing curve is generated, and the CAD data can also be used for direct processing. It can be used for laser surface treatment, drilling, welding and mold repair of workpieces. The accuracy requirements are high.
4. Vacuum robot
Vacuum robot is a kind of robot working in a vacuum environment. It is mainly used in the semiconductor industry to realize the transfer of wafers in a vacuum chamber.

Vacuum manipulators are difficult to import, restricted, large in usage and strong in versatility, which has become a key component that restricts the research and development progress of semiconductor equipment complete machines and the competitiveness of complete machine products. The accuracy requirements are high.
5. Spraying robot
Paint spraying robots are generally hydraulically driven, which has the characteristics of fast movement speed and good explosion-proof performance, and can be taught by hand-to-hand teaching or point-based teaching.

Paint spraying robots are widely used in process production departments such as automobiles, meters, electrical appliances, and enamel. The working environment of the spraying robot is harsh, and its accuracy requirements are low.
6. Handling robot
The handling robot is controlled by a computer and has functions such as movement, automatic navigation, multi-sensor control, and network interaction. It can be widely used in various industries such as flexible handling and transmission. It is also used in automated three-dimensional warehouse, flexible processing system, flexible assembly system ;

At the same time, it can be used as a means of transportation in the sorting of items at stations, airports and post offices. It has a large load and no strict accuracy requirements.
3. Classification of industrial robots

Four. Industrial robot performance evaluation index
The basic parameters and performance indicators that represent the characteristics of the robot mainly include working space, degrees of freedom, effective load, motion accuracy, motion characteristics, and dynamic characteristics.

â–² Indications of performance evaluation of industrial robots
1. Work space
The working space refers to a set of positions where a specific part of the robot arm can reach the space under certain conditions. The character and size of the working space reflect the working capacity of the robot.
2. Freedom of movement
The degree of freedom of motion refers to the number of variables required for the robot manipulator to move in space, and is used to indicate the degree of flexibility of the robot's movements. It is generally expressed by the number of independent movements that move along the axis and rotate about the axis.
A free object has six degrees of freedom in space (three degrees of rotation and three degrees of freedom of movement). Industrial robots are often an open link system, each joint has only one degree of freedom, so usually the number of degrees of freedom of the robot is equal to the number of joints. The greater the number of degrees of freedom of the robot, the stronger the function.
3. Payload
The effective load refers to the weight or the force or moment that the robot manipulator may carry at the arm end when it is working, and it is used to indicate the load capacity of the manipulator.
When the robot is in different postures, the maximum allowable mass is different. Therefore, the rated mass of the robot refers to the maximum mass that can be carried by the end of the wrist joint in any posture of the arm in the working space.
4. Movement accuracy (Accuracy)
The accuracy of the robot mechanical system mainly involves pose accuracy, repeated pose accuracy, trajectory accuracy, repeated trajectory accuracy, etc.
Pose accuracy refers to the deviation between the command posture and the actual to posture center when approaching the command posture from the same direction. The repeated pose accuracy refers to the degree of inconsistency between the actual pose and the pose after repeated responses to the same command from the same direction n times.
Trajectory accuracy refers to how close the robot mechanical interface follows the command trajectory n times from the same direction. Track repeat accuracy refers to the degree of inconsistency between a track and a track after n times in the same direction.
5. Motion characteristics (Sped)
Speed ​​and acceleration are the main indicators that indicate the robot's motion characteristics. In the manual of the robot, the maximum stable speed of the main freedom of movement is usually provided, but it is not enough to simply consider the maximum stable speed in practical applications, and also pay attention to the maximum allowable acceleration.
6. Dynamic characteristics
Dynamic characteristics The dynamic parameters of the structure mainly include mass, moment of inertia, stiffness, damping coefficient, natural frequency and vibration mode.
5. Comprehensive interpretation of industrial robots
1. Current status of industrial robots in China
The reason why industrial robots can emerge in the Chinese market:
The first is that in terms of cost, the robot is usually only a quarter of the labor cost;
Secondly, robots can bring a lot of new added value in terms of quality, efficiency and management.
Therefore, under the combined effect of factors such as rapid advancement of robot technology, drastically reduced prices, labor shortage, and rising labor costs, China's industrial robot industry is in a blowout era.
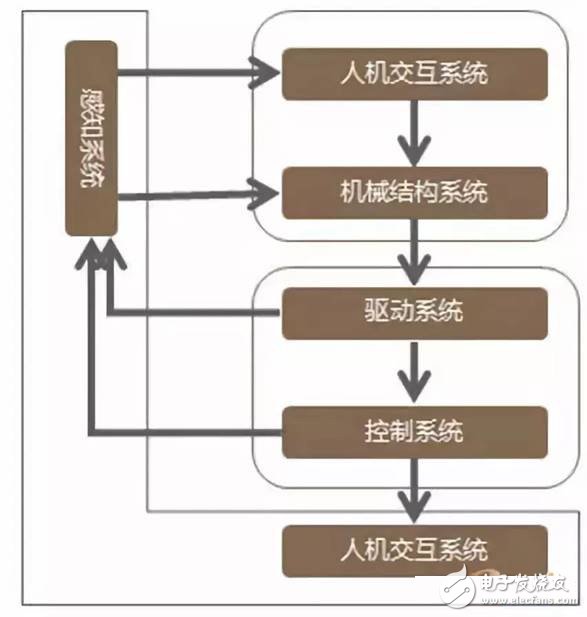
2. The key technology of industrial robot
The industrial robot is composed of 3 parts and 6 subsystems. 3 Most of them are mechanical parts, sensing parts and control parts. The six subsystems can be divided into mechanical structure system, drive system, perception system, robot-environment interaction system, human-machine interaction system and control system.
The key basic components of the robot are mainly divided into the following three parts: high-precision reducer, high-performance AC and DC servo motor and driver, high-performance controller, etc. Robot performance indicators mainly include working space, degrees of freedom, effective load, motion accuracy, motion characteristics, dynamic characteristics, etc.
3. Technical challenges facing industrial robots
Although robot technology has made great progress in recent years, we must soberly see the huge challenges facing the development of China's industrial robot industry.
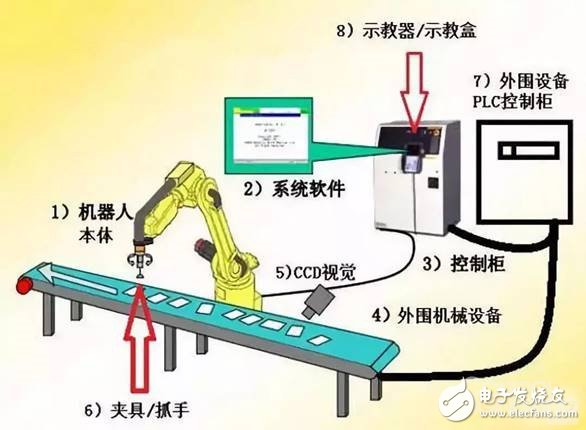
Industrial robot equipment
Intelligent robots are increasingly involved in human production and life. The development of artificial intelligence technology is strong and the development prospects are eye-catching. It is the fastest growing market in the global robot industry and has become the world's largest industrial robot market.
The Temperature sensor for busbar installed in cabinet is suitable for the temperature monitoring of cable joints, circuit breaker contacts, knife switches, high-voltage cable intermediate heads, dry-type transformers, low-voltage high-current and other equipment in high and low voltage switch cabinets to prevent them from being in operation. Heating due to excessive contact resistance of the contact caused by oxidation, looseness, dust and other factors becomes a safety hazard. This improves equipment safety, timely, continuous and accurate reflection of equipment operating status, and reduces equipment accident rate.

Temperature Montoring,Wireless Temperature Sensor,Wireless Temperature Measuring Equipment,Multi Channel Temperature Controller
Jiangsu Acrel Electrical Manufacturing Co., LTD. , https://www.acrel.com.pk