
In recent years, consumer drones have become increasingly popular for shooting stunning footage, transporting relief supplies, and even for competition. Most drones use a variety of sensing technologies for autonomous navigation, collision detection, and many other features. Ultrasonic sensing is especially helpful for drone landing, hovering and ground tracking.
This article refers to the address: http://
The drone landing aid is a function of the drone that can detect the distance between the bottom of the drone and the landing area, determine whether the landing point is safe, and then slowly descend to the landing area. Although GPS monitoring, barometric sensing and other sensing technologies contribute to the landing process, in this process, ultrasonic sensing is the primary and most accurate basis for UAVs. Most drones also have hover and ground tracking modes that are primarily used to capture footage and land navigation, where ultrasonic sensors help keep the drone at a constant height above the ground. Part 1 of this blog post series discusses how to combine ultrasonic sensors with automotive applications. This blog post will explore the reasons why ultrasonic sensing can be used in drone applications.
Ultrasonic principle
Ultrasound is defined as the use of sound waves above the upper limit of human hearing – see Figure 1.

Figure 1: Ultrasound range
Ultrasonic waves can pass through various media (gas, liquid, solid) to detect objects with acoustic impedance mismatch. The speed of sound is the distance per unit time when sound waves travel in an elastic medium. For example, in dry air at 20 ° C (68 ° F), the speed of sound is 343 meters per second (1,125 feet per second). Ultrasonic attenuation in air increases with increasing frequency and humidity. Therefore, air-coupled ultrasonic waves are typically limited to frequencies below 500 kHz due to excessive path loss/absorption.
Ultrasonic ToF
As with many ultrasonic sensing applications, the UAV Landing Assist uses the Time of Flight (ToF) principle. ToF is an estimate of the round trip time of the ultrasonic wave emitted from the sensor to the target object and then reflected back from the object back to the sensor, as shown in Figure 2.
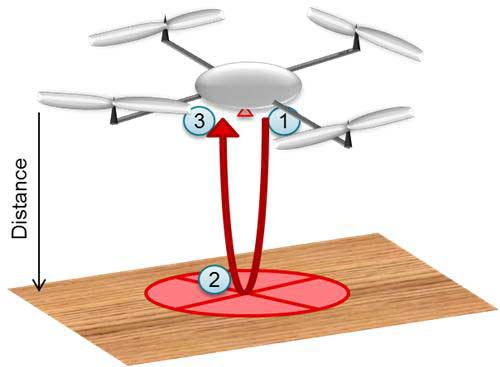
Figure 2: Ultrasonic ToF schematic for drone landing
At point 1 in Figures 2 and 3, the ultrasonic sensor of the drone emits sound waves, which are represented as saturated data on the return signal processing path. After transmission, the signal processing path becomes muted (point 2) until the echo is reflected back from the object (point 3).

Figure 3: Phase of the ultrasonic ToF

Equation 1 calculates the distance from the drone to the ground or from the drone to another object:
The distance (d) is the distance from the ultrasonic sensor on the drone to the ground/object, ToF(t) is the ToF defined earlier, and SpeedOfSound(v) is the speed of sound through the medium. ToF(t)×SpeedOfSound(v) is divided by 2 because ToF calculates the time for the ultrasonic echo to and from the object.
Why use ultrasonic induction for drone landing?
While numerous sensing technologies can detect the proximity of objects, ultrasonic sensing works well in terms of detection distance, solution cost, and reliability of different surfaces when the drone is landing.
The common requirement for drone ground tracking and landing is the ability to reliably detect distances 5 meters above the ground. Assuming that the signal is adjusted and processed correctly, ultrasonic sensors in the 40-60 kHz range can usually meet this range.
Texas Instruments' PGA460 is an ultrasonic signal processor and sensor driver for ultrasonic sensing in air-coupled applications such as drones that can meet or exceed 5 meters. However, the coordination of ultrasonic sensing is a limitation in the near field detection of objects. All ultrasonic sensors used in air-coupled applications have an excitation period called decay time or oscillation time, during which the piezoelectric film vibrates and emits ultrasonic energy, making it difficult to detect any incoming echo.
To effectively measure objects during ringing, many drone designers install separate sensors for the transmitter and receiver. By separating the receiver, the drone can detect the object during excitation of the transmitter. The PGA 460 therefore has superior near field detection performance – as low as 5 cm or less.
Ultrasonic sensing technology is also a cost-competitive technology, especially when using integrated solutions such as the PGA460, which includes most of the required chips. The PGA460 can either drive the sensor directly using a half-bridge or H-bridge or use a transformer to drive the sensor; the latter is primarily used for sealed "closed" sensors. The PGA 460 also includes a complete analog front end for receiving and adjusting ultrasonic echoes. In addition, the device can also calculate ToF by digital signal processing (see Figure 4).
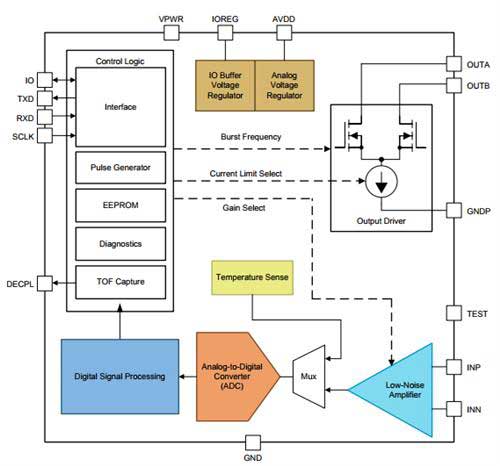
Figure 4: Functional Block Diagram of PGA460
Finally, ultrasonic sensing can detect surfaces that are difficult to solve with other technologies. For example, drones often encounter glazing and other glass surfaces on buildings. Light sensing technology sometimes passes through glass and other transparent materials, which makes it difficult for drones to hover over glass buildings. Ultrasonic waves can reliably reflect the glass surface.
Although ultrasonic sensing is primarily used for drone-assisted and hovering, its powerful price/performance ratio is driving drone designers to explore other applications of the technology. The rapidly growing field of drones has great potential.
Guangdong Ojun Technology Co., Ltd. , https://www.ojunconnector.com