
This paper introduces a wireless remote control micro-seismic motor vibration speed control circuit, which can complete the start, stop, acceleration and deceleration control of the motor speed in the wireless remote control mode.
Circuit principle
The microseismic motor (also known as the hollow cup motor) has the characteristics of small volume and obvious shock. The common shape is shown in Figure 1. There are many models on the market that are driven by DC voltage. Here, the WZIS-6001A (B) type is taken as an example, and its characteristics are shown in Table 1. When the voltage is changed from 2.0 to 3.8V, the motor speed gradually increases (from 7000 to 11 000 rpm) as the voltage increases. Through experimental tests, when the voltage produces a change of 0.3V, the change of the motor speed can be felt by the vibration of the motor.
Figure 1 The shape of the microseismic motor

The voltage range of 2.0 to 3.8V is divided into seven voltage ranges, which are 2.0V, 2.3V, 2.6V, 2.9V, 3.2V, 3.5V, and 3.8V, respectively. The rated current of the motor is 40 mA. To generate a voltage difference of 0.3 V, it can be done with a 7.5 Ω resistor. Referring to the corresponding dashed line portion in Fig. 2, the 74HC138 constitutes a 3-8 decoding circuit that converts the 3-bit binary inputs of the A, B, and C terminals into the decoded outputs of Y0 to Y7.
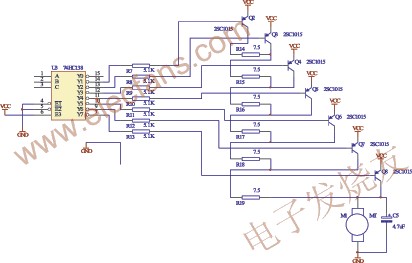
Figure 2 Motor speed gear position control circuit
When A, B, and C are 111, Y7=0, other Y0~Y6 are 1, Q8 is turned on, Q2~Q7 is turned off, and power supply VCC is applied to motor M1 via Q8. At this time, the motor obtains the highest voltage and has the highest speed. ;
When A, B, and C are 001, Y1=0, other Y0, Y2~Y7 are 1, Q2 is turned on, Q3~Q8 is turned off, and power supply VCC is applied to motor M1 via Q2, R14~R19, then the motor is obtained. The lowest voltage, the lowest speed;
When A, B, and C are 000, Y0=0, the other Y1 to Y7 are 1, and Q2 to Q8 are all turned off, and the motor stops running.
R7 to R13 in Fig. 2 constitute the base limiting current resistance of Q2 to Q8, Q2 to Q8 operate in the switching operation state, and C5 eliminates the self-induced absorption capacitance of the motor M1.
Remote control operation is converted into 74HC138 input A, B, C circuit
In order to realize the conversion of the button control into the circuit of the 74HC138 input A, B, C in Fig. 2, the CD40193 constitutes the addition and subtraction bidirectional counter, and the CPU and CPD are respectively the clock input terminals of the addition and subtraction counting, as shown in the corresponding dotted line portion in FIG.
When the button S1 is pressed, A+ is high level. When Q0, Q1, and Q2 are not 1, the output of U2C is high. At this time, CLK reaches the CPU end of U3 CD40193 via U2A, as a binary count clock. While S2 is not pressed, A- is low, and CLK cannot reach the CPD end of U3 CD40193 via U2B. At this time, Q0, Q1, and Q2 generate a binary up count from 000 to 111. When Q0=A, Q1=B, and Q2=C, the motor is provided with a driving signal whose rotational speed is gradually increased. Continue to press S1. When the count is up to Q0=1, Q1=1, Q2=1, the output of U2C is low. At this time, U2A prohibits CLK from passing, its output is high, and U3 CD40193 no longer counts up. The motor operates at the highest speed and continues to press the S1 speed. At this time, the motor speed can only be changed by the S2 button operation.
When the button S2 is pressed, A- is high level. When Q0, Q1, and Q2 are not 0, the output of U5A is high level, and CLK reaches the CPD end of U3 CD40193 via U2B, as a binary down counting clock. Similarly, S1 is not pressed, CLK cannot reach the CPU end of U3 CD40193 via U2C, and the corresponding Q0, Q1, and Q2 generate a binary down count of 111-000, which provides a driving signal for the motor to gradually decrease in rotational speed. When pressing S2 to Q0=0, Q1=0, Q2=0, the same U5A output is low level, U2B prohibits CLK from passing, U3 CD40193 does not count down, the motor is stopped, and when S2 is continued, the motor remains The stop state does not change. At this time, the motor speed can only be changed by the S1 button operation. The function of R8 and C1 in the circuit is: when VCC is turned on and on, the capacitor C1 is too late to charge, so that the preset end PL of U3 CD40193 is low level, and the preset number 0000 of P0, P1, P2, P3 is asynchronously preset. Go to Q0, Q1, Q2, Q3. That is to say, the motor will not malfunction when the power is turned on and there is no S1, S2 pressing action.
CLK generation circuit
The CLK generation circuit is shown in the corresponding broken line portion of FIG. When S1 and S2 have no button operation, A+ and A- are both low level, U4B input 5 pin is low level, and its output is high level. At this time, CLK has no clock pulse output, and the aforementioned 1.2 U3 The CD40193 will keep the output of Q0, Q1, and Q2 unchanged, that is, the motor speed will not change. When any one of S1 and S2 is operated, U4B's 5 pin is high level, and the circuit generates frequency is 1/(1.4R5C2), that is, an oscillation clock output of about 2Hz, which provides up/down counting for the circuit of Figure 3. Clock CLK. Among them, LED1 prompts the user to change the speed. Each time it flashes, it means that the speed is increased or decreased by one level.
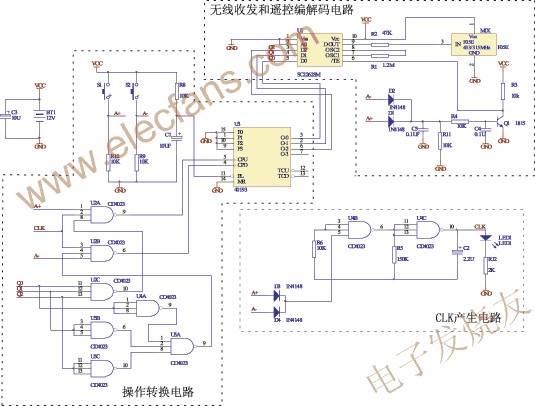
Figure 3 operation conversion, CLK generated codec circuit
Wireless transceiver and remote codec circuit
In order to realize the wireless remote control operation between the circuit of FIG. 2 and the circuit of FIG. 3, a wireless transmission and remote control coding circuit is introduced between Q0, Q1, Q2 to A, B, C, as shown in the corresponding dotted line in FIG. 3, wireless reception and The remote control decoding circuit is shown in the corresponding dotted line portion of FIG.
In Figure 3, U1 SC2262 is a CMOS universal remote encoder with the same function as the PT2262 (reducing the useless pins). The F05E is a 3 to 12V powered, sound-sound resonator with frequency stabilization and can operate at 433MHz or 315MHz. The RF transmitter module has a 3-pin IN-side trigger pole that does not transmit when there is no input signal. A trigger emission is generated when it triggers a very signal input. Each time it is triggered, it outputs a series of 3 times of pulse signals with a frequency of about 1 kHz per second. The transmission distance can be improved by changing the antennas on R2 and F05E. When the antenna is not added, and R2=47kΩ, the transmission distance can reach 12~15m. When R2=10kΩ, when the working frequency is 433MHz, when the 18cm enameled wire is added to the F05E as the antenna, the transmission distance can reach about 50m.
Among them, D1, D2, C4, C5, R3, R4, R11, Q1 constitute the effective control of the coding output of SC2262. When S1 and S2 have no button operation, A+ and A- are low level, Q1 is not conductive, and SC2262 is not coded. Output; when there is a button operation, the button signal is delayed by C4, C5, R4, and R11 to make Q1 turn on, and SC2262 encodes the input of Q0, Q1, and Q2 and outputs it to F05E for transmission. The purpose of the C4, C5, R4, and R11 delays is to eliminate the jitter of the buttons.
In Figure 4, J04V is a super-regenerative RF receiving module. SC2272SML3 is a universal remote-control decoding IC that cooperates with the former SC2262. It has the same function as PT2272ML. Both of them contain DIN terminal without new signal input. D0, D1, D2 keep the previous content. change. J04V restores the received RF signal to the data signal and sends it to SC2272SML3 to obtain the A, B, and C signals required by U3 74HC138 in Figure 2. R2 and D7 are the working indicators of the receiving circuit.
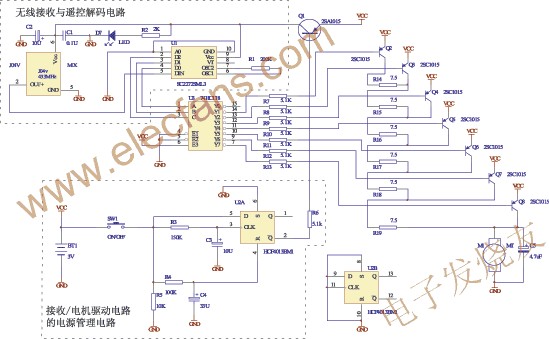
Figure 4 Wireless receiving and remote control decoding circuit, gear control circuit and power management circuit
Receiver/motor drive circuit power management circuit
The power management circuit of the receiving/motor drive circuit is shown in the corresponding dotted line in Figure 4. When SW1 is pressed, R3, C3 and R4, C4 form two integration circuits. According to the characteristics of CD4000 series, when the potential of CLK (CD4013 PIN3) and R (CD4013 PIN4) rises to 1/2VCC, the CD4013 output occurs. change. The time at which the CLK terminal arrives is t1 after SW1 is pressed, and the time at which the R terminal arrives is t2 after SW1 is pressed. From Fig. 1, there are t1=R3C3ln2=1(s), and t2=R4C4ln2=2.29(s). That is, when SW1 presses time t:t1
Conclusion
This circuit can be applied to the vibrometer circuit of medical acupuncture, and can also be applied to various health care devices.
Stage Lights,Beam Lights,Stage Lights,Moving Head Lights
Guangzhou Chengwen Photoelectric Technology co.,ltd , https://www.cwleddisplay.com